

contact us
联系我们POSTTIME:2024-03-12 作者:佚名 点击量:
这些优化算法在Abaqus 2012版中都可以使用,简单介绍如下:
自适应设计实验方法,通过动态改变设计变量的数量和取值范围来提高效率。
自适应DOE是一种填充空间的DOE技术。它通过最大化与任何其他点的距离来优化点在空间中的位置,这种策略确保了没有两个点彼此太近。
填充DOE的一系列N个空间将集中在尚未评估的投影上(类似于梯度法步骤)。此投影仅在下一步中进行评估。DOE搜索空间将从一次迭代缩小到另一次迭代,以产生更准确的最优值。下图显示了将点填充到指定边界框中的示例,以使用均匀分布的点生成更准确的最优值。
?

一种模拟退火算法,使用温度控制来探索设计空间并找到最优解。
当发现全局最优比快速改进设计更重要时,自适应模拟退火(ASA)算法非常适合用短时间运行的分析代码来解决高度非线性的问题。
为了理解自适应模拟退火算法是如何工作的,它有助于将地理地形等复杂系统所呈现的问题可视化。例如,考虑一个具有两个“参数”的山脉,例如沿南北方向和东西方向。我们想在这片地形上找到最低的山谷。ASA算法解决这个问题的方法类似于使用一个可以从一个山谷反弹到另一个山谷的球。我们从高“温度”开始,其中温度是一个ASA参数,模拟了热物体(如热熔融金属)中快速移动粒子的影响;球被允许进行非常高的反弹,并且能够在任何山上反弹,进入任何山谷,只要有足够的反弹。由于温度变得相对较低,球不会弹得那么高,而是会沉降,被困在相对较小的山谷范围内。
一个基于种群的多目标优化算法,允许处理多个目标函数和多个限制条件。
Archive-Based Micro Genetic Technique是一种用于间接获取古代DNA信息的技术。它利用现代样本与古代物品上的微生物共生体(例如牙龈或骨髓)接触,从而通过微生物遗传物质中的古代DNA序列重建出古代生物的基因组信息。这种技术在保护古代遗址和文物的同时,也为相关研究提供了无限可能性,使得科学家们能够更加深入地了解数千年前的生态系统和人类文化。它在考古学、生物学和医学等领域有着广泛的应用价值。
基于档案的微遗传算法(AMGA)是一种进化优化算法,它依赖于遗传变异算子来创建新的解决方案。在AMGA中部署的生成方案可以归类为生成方案,因为在特定的迭代(生成)过程中,只有在该迭代之前创建的解决方案才能参与选择过程。然而,该算法在每次迭代中生成的新解数量非常少(每次迭代只能使用两个解)。因此,它也可以被归类为一种几乎稳态的遗传算法。该属性有助于该算法实现比大多数世代遗传算法更快的收敛。
AMGA对所获得的良好解决方案进行外部存档。外部档案在每次迭代时都会更新,并提供有关算法搜索历史的信息,然后在选择过程中利用这些信息来创建父群体。
AMGA之所以得名,是因为它的人口规模非常小,并使用档案来维护其搜索历史。建议您使用较大的存档大小(建议值为500)。如果档案的大小与允许的函数评估的数量相同(即,算法存储其完整的搜索历史),则可以获得最佳结果。档案的大小决定了所提出的算法的计算复杂性;然而,对于计算量大的优化问题,算法所花费的实际时间可以忽略不计。使用档案更新亲本种群,并对亲本种群进行二元锦标赛选择(用于创建交配种群)。算法的设计与变量的编码无关;因此,AMGA可以与几乎任何类型的编码一起工作(只要向算法提供合适的遗传变异算子)。该算法借鉴了NSGA-II中的Pareto排序概念,基于双层适应度机制。该算法的基本流程图如下:
开始操作。
生成初始总体。
评估初始人群。
更新存档(使用初始填充)。
重复以下步骤。。。
从存档中创建父填充。
根据父种群创建交配池。
从交配池中创建后代种群。
评估后代群体。
更新档案(使用后代群体)。
…直到终止。
报告存档中所需的解决方案数量。
结束操作。
AMGA的流程图也可以被视为借鉴NSGA-II、SPEA2和FastPGA的思想的组合。父种群是使用从SPEA2借来的基于环境选择的策略从档案中创建的。然而,父母群体的规模受到FastPGA中使用的动态群体规模方法的影响。交配池的创建使用二元锦标赛选择,与NSGA-II中使用的相同。任何遗传变异算子都可以用来创建非春季种群。用于更新精英群体的策略依赖于统治水平、解决方案的多样性和档案的当前规模,并且它基于借鉴NSGA-II的非统治排序概念。
SPEA2和NSGA-II都可以由AMGA通过调整各种参数(并通过选择合适的分集保持算子)来模拟。为了减少每代的功能评估次数,AMGA使用较小的交配池大小。在搜索的初始阶段,档案(或父群体)中的大多数解决方案都占主导地位,只有最好的和多样化的解决方案才包括在交配池中。这个动作减少了达到帕累托最优前沿所需的函数评估的数量。一旦获得了帕累托最优前沿附近的一小组解,就会从最多样化的父解中创建新的解,以填补帕累托优化前沿的空白。使用存储大量解决方案的外部存档(推荐值为500)可以提供有关搜索空间的有用信息。它还倾向于在模拟结束时生成大量的Pareto点。AMGA使用有效的多样性保护技术。对于两个目标的情况,AMGA使用拥挤距离(借用NSGA-II)。对于两个以上目标的情况,AMGA依赖于有效的最近邻搜索(用于矢量量化)。AMGA使用的遗传变异算子有模拟二进制交叉算子(SBX)和多项式变异算子。AMGA被设计用于处理实变量和约束多目标问题,而大多数基于梯度的方法无法解决这些问题。它不依赖于权重来耦合所有目标,而是使用无惩罚参数的方法来处理约束。

一种使用N个顶点的多面体,通过不断缩小多面体的大小来找到最优解的算法。
Downhill单纯形技术是一种几何直观的算法。
单纯形被定义为由n+1个顶点顶点组成的n维中的体。指定每个顶点的位置可以完全定义单纯形。在二维中,单纯形是一个三角形。在三维中,它是一个四面体。随着算法的进行,单纯形通过一系列步骤向下到达最小值的位置。这些步骤可以分为反射、展开和收缩。大多数步骤都是反射,包括将目标函数最大(最差)的单纯形的顶点通过单纯形的相对面移动到较低(较好)的点。反射保持单纯形的体积。在可能的情况下,扩展可以伴随反射来增加单纯形的大小,并通过允许更大的步长来加快收敛。相反,收缩会“收缩”单工,使其稳定在最小值或穿过沙漏颈这样的小孔。当以大的初始步骤开始时,该方法具有找到全局最小值的最高概率。初始单纯形将跨越设计空间的更大部分,并且陷入局部最小值的可能性更小。然而,对于复杂的超维拓扑,该方法可能会失败。
Evolutionary Optimization Algorithm (Evol)通过模拟进化过程来不断优化参数。
进化优化算法(Evol)是一种基于Rechenberg和Schwefel工作的进化策略,通过向每个设计变量添加正态分布的随机值来变异设计。变异强度(正态分布的标准差)是自适应的,并且在优化循环中发生变化。该算法已经过校准,可以有效地解决设计空间中变量数量少且有一些噪声的设计问题。
进化优化算法具有以下特点:
设计空间离散化。该算法只考虑离散设计点,通过最小离散步长技术选项进行控制(默认为设计变量域的2%)。
重复计算检查。该算法确保提交评估的两个设计点不相同。
西格玛扩展。如果在随机化后只发现重复计算,则该算法会增加随机正态分布的标准偏差。
连续变量搜索。该算法可以同时改变所有设计变量,也可以一次改变一个变量。
并行执行。该算法已被并行化,以在n个并行资源可用时产生n个子代,并使用n个子代中最好的子代来前馈到下一次迭代。
通过不断移动设计点来搜索最优解。
Hooke-Jeeves Direct Search Method Technique,Hooke-Jeeves技术从开始猜测开始,并搜索局部最小值。
在Hooke-Jeeves技术中,目标函数不需要是连续的。因为该算法不使用导数,所以函数不需要是可微的。因为这种技术还有一个收敛参数rho,所以可以确定最大收敛概率所需的函数求值的数量。

Large Scale Generalized Reduced Gradient (LSGRG) Technique,大规模广义降阶梯度(LSGRG)技术,通过对多个单纯形不断迭代来优化参数。
大规模广义缩减梯度(LSGRG)技术使用广义缩减梯度算法来解决约束非线性优化问题。该算法使用搜索方向,使得任何活动约束对于该方向上的一些小移动都保持精确的活动状态。
LSGRG算法通过在整个设计空间中一次一个地遵循约束边界来操作。在优化组件编辑器中指定输出约束的顺序可能会对执行过程产生影响。首先在优化组件编辑器中选择的输出约束将首先由LSGRG操作。最终设计点可能不同,这取决于优化组件编辑器中约束选择的顺序,除非设计空间拓扑和最大迭代次数允许LSGRG实现完全收敛到相同的最优设计点。
?
求解无约束非线性优化问题的算法,采用序列二次规划方法来求解。
Mixed-Integer Sequential Quadratic Programming (MISQP) Technique
混合整数序列二次规划(MISQP)是一种基于信赖域的方法,用于解决包括整数和其他离散变量的问题。
与其他序列二次规划方法类似,MISQP假设目标函数和约束是连续可微的。
此外,MISQP假设目标函数和约束函数相对于整数变量是平滑的。与其他混与整数方法不同,MISQP不会放松整数变量。MISQP使用分枝定界过程来求解每个连续的混合整数二次规划(MIQP)。MISQP保证了凸问题的收敛性,并对非凸问题产生了良好的结果。
求解具有非光滑目标函数和约束条件的多目标优化问题的算法。
Modified Method of Feasible Directions (MMFD) Technique
可行方向的改进方法(MMFD)是一种用于求解约束优化问题的直接数值优化技术。
可行方向技术的改进方法具有以下特点:
快速获得最佳设计,
处理不平等和平等约束
在最佳情况下以高精度满足约束。
?
基于多目标球算法的优化算法,可以解决多个非线性的目标函数问题。
Multifunction Optimization System Tool (MOST) Technique
多功能优化系统工具(MOST)技术试图将设计问题视为一个纯粹的连续问题来解决。
MOST技术首先解决给定的设计问题,就好像它是一个纯粹的连续问题一样,使用顺序二次规划来定位初始峰值。如果所有的设计变量都是真实的,那么优化就到此为止。否则,对于每个这样的参数,该技术分支到满足一个非实参数的整数或离散值极限的最近点。这些限制被添加为新的约束,该技术重新优化,产生一组新的峰值,从中进行分支。随着优化的进展,该技术专注于连续非实参数的值,直到满足所有极限。

1.1.1.11 多岛遗传算法(Multi-Island GA)
通过多个种群的进化过程来解决复杂的优化问题。
Multi-Island Genetic Algorithm在多岛遗传算法中,与其他遗传算法一样,基于目标函数和约束惩罚的值,每个设计点都被视为具有一定适应度值的个体。具有更好的目标函数值和更好的惩罚值的个体具有更高的适应度值。
多岛遗传算法与传统遗传算法的区别在于,每个个体群体都被划分为几个称为“岛屿”的子群体。所有传统的遗传运算都是在每个子群体上单独进行的。然后从每个岛屿中挑选一些个体,并定期迁移到不同的岛屿。此操作称为“迁移”。有两个参数控制迁移过程:
迁移间隔。每次迁移之间的代数。
迁移率。移民时从每个岛屿移民的个人百分比。
基于粒子群优化算法的多目标优化算法。
Multi-Objective Particle Swarm Technique,粒子群优化模拟动物群体的社会行为,例如成群的鸟类或鱼群。寻找最佳设计点的过程类似于动物的觅食活动。
粒子群优化是一种基于群体的搜索过程,其中个体(称为粒子)在搜索区域内连续改变位置(称为状态)。换句话说,这些粒子在设计空间中“飞来飞去”,寻找最佳位置。就像现实世界中动物倾向于跟随离食物更近的邻居一样,粒子及其邻居遇到的最佳位置被用来决定粒子的下一个位置。粒子的状态是优化问题中所有设计变量的值及其在设计空间中的速度,每一次移动都会产生新的一代。

支持非线性、不等式约束问题的优化求解。
Neighborhood Cultivation Genetic Algorithm (NCGA)
在邻域培育遗传算法(NCGA)技术中,每个目标参数都被单独处理。对设计进行突变和交叉的标准遗传操作。交叉过程基于“邻域培养”机制,其中交叉主要在价值接近目标之一的个人之间进行。在优化运行结束时,构建了一个帕累托集(pareto set),其中每个设计都有目标值的“最佳”组合,并且在不牺牲一个或多个其他目标的情况下改进一个目标是不可能的。
由J.D.Schaffer(1985)提出的向量评估遗传算法(VEGA)被认为是遗传算法应用于多目标优化问题的开创性研究。然而,在这种早期的多目标遗传算法中,基本算法是对单目标遗传算法的简单扩展。帕累托最优的思想没有被明确地包括在内。
第一个明确采用帕累托最优思想的多目标遗传算法是由C.M.Fonseca和P.J.Fleming(1993)提出的多目标遗传学算法(MOGA)。在本节的剩余部分中,该算法被称为“丰塞卡的MOGA”,以将其与多目标遗传算法的通用名称区分开来。
在Fonseca的MOGA中,解的支配关系是通过“Pareto排序”来定义的,这是一种基于Pareto最优性的排序。为了避免在目标空间中产生窄范围的解决方案,它基于共享距离执行小生境,使接近其他解决方案的解决方案的适应度较低。
尽管Fonseca的MOGA是第一个明确采用Pareto最优性思想的多目标遗传算法,但仍有问题报道。如前所述,在使用小生境的适应度计算中,该算法有时会生成不合理的适应度值,例如帕累托前沿的解由于小生境而具有较低的适应度。
由N.Srinivas和K.Deb(1994)提出的非支配排序遗传算法(NSGA)解决了MOGA中存在的问题,并基于Pareto最优。NSGA的主要功能如下:
使用非支配排序对解决方案进行排序,以及确保级别较低的解决方案具有较低的适应度。
这意味着帕累托前沿的解将具有最高的适应度值。它与Fonseca的MOGA类似,它根据共享距离执行niching。
E.Zitzler和L.Thiele(1999)提出的强度Pareto进化算法(SPEA)是当前多目标遗传算法的先驱。在NCGA的多目标遗传算法中,首次引入了单目标遗传算法的精英性。自SPEA以来,在多目标遗传算法中,整个种群由两个子种群组成。一种是保存精英个体,而另一种是执行遗传算子生成子代以进行最优解搜索。后者与1990年代中期提出的MOGA和NSGA中的人口具有相同的作用。前者被称为“帕累托档案(Pareto Archive)”或“档案(Archive)”。SPEA还引入了原始机制,可以保持解决方案的多样性和扩展性。这种机制被称为“聚类”。它基于帕累托最优和SPEA中拥挤水平和排名值等于适应度的想法对解决方案进行排名。
可以处理多个非线性目标函数和多个限制条件。
Non-dominated Sorting Genetic Algorithm (NSGA-II)
非支配排序遗传算法(NSGA-II)是由K.Deb和S.Agrawal于2001年提出的。它是NSGA的改进版本。
对最初的NSGA进行了重大更改,创建了NSGA-II。两者之间唯一的共同特征是采用非支配排序。NSGA-II具有用于遗传搜索的Pareto档案P和群体Q,就像强度Pareto进化算法(SPEA)一样。然而,它更积极地使用Pareto档案。在NSGA-II中,档案P中的个体数量为N,等于群体Q中的个体数。另一方面,在SPEA中,档案P中的最佳个体数通常被认为是Q中个体的四分之一。交叉和突变的遗传算子在群体Q^t上进行,并且提取下一代的选择被应用于集合并集P^t U Q^t,创建p^(t+1)。选择包括两种机制:“非支配排序”和“拥挤距离排序”。Q^(t+1)是由P^(t+1)通过选择产生的,即所谓的“交配选择”

Overview of Pointer Technique Pointer Control Algorithm Pointer Core Algorithms Pointer's Performance on Benchmark Problems
Overview of Pointer Technique采用“指针”的方式来指导种群的进化走向。
指针技术由于有一种特殊的自动控制算法,可以以全自动的方式有效地解决广泛的问题。指针技术的目标是在不牺牲性能的情况下,让非专业用户更容易访问优化。
指针技术由一组互补的优化算法组成:,
linear simplex线性单纯形,
sequential quadratic programming序列二次规划,
downhill simplex下坡单纯形
genetic algorithms遗传算法
优化的一个问题是“对于一个任意的系统,你不能说任何话。”这种说法在某种程度上是正确的。但是,可以提出以下意见。首先,一旦知道一个系统,它就可以被分类。其次,一旦被分类,有一些优化方法的组合会比随机猜测更有效。
了解系统的类型对于能够有效地解决系统问题至关重要。优化理论一直是以另一种方式发展起来的。假设系统具有一定的数学形式,那么优化该系统的最具成本效益的方法是什么?随着时间的推移,基于这些假设的大量优化方法被开发出来。这些方法中的每一种都有许多自由度,以使该方法适应手头的问题。从本质上讲,人们想要解决的特定问题(例如,设计更轻的结构)现在已经转化为找到设计结构的正确算法。第二项任务在许多方面都比最初的任务更艰巨。对于许多工程师和科学家来说,这个问题已经从已知领域转变为未知领域。因此,优化技术并没有成为许多人所希望的巨大商业成功。
因此,控制问题成为指针优化引擎发展的一个驱动因素。指针技术使用一种专有算法,该算法自动控制一组优化资源。类似地,指针技术通过利用和利用一组不同的互补优化算法的力量,以全自动的方式有效地解决了一系列问题。
Pointer Control Algorithm:指针控制算法
指针技术的名字来源于指针狗。尽管指针犬在基因上都很相似,但它们可以拥有专门的技能。有些人可以“指出”毒品,而另一些人可以“指明”受害者被埋在雪崩下的位置。这些特殊技能代代相传。
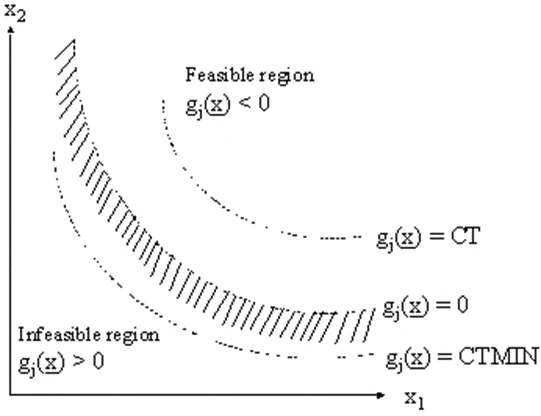
下图说明了控制算法。
?
指针技术由一组互补的优化算法组成。目前,指针技术使用线性单纯形、序列二次规划(SQP)、下坡单纯形和遗传算法。所有的控制参数(如初始步长)都需要正确设置才能有效运行。如上图所示,这个过程称为优化器训练。该过程的输入是设计变量、约束条件和搜索目标,以及可用于搜索的总时间和优化器的选择和正确设置方面的任何先前经验。
指针控制算法通过以下方式更改优化器设置:
最好的答案是在最短的时间内找到的。在这种情况下,优化器被配置为使得从单个起始位置实现目标函数的最大改进率。
获得的经验最多。优化器设置的选择方式是在给定的优化时间内实现最高的优化器稳健性。鲁棒性定义为通过一组随机起始向量的局部最优归一化的最佳目标函数(有史以来)的平均谐波误差。这种方法比仅仅找到最佳答案慢一个数量级,但所获得的经验将使您能够在尽可能短的时间内解决类似类别的问题。
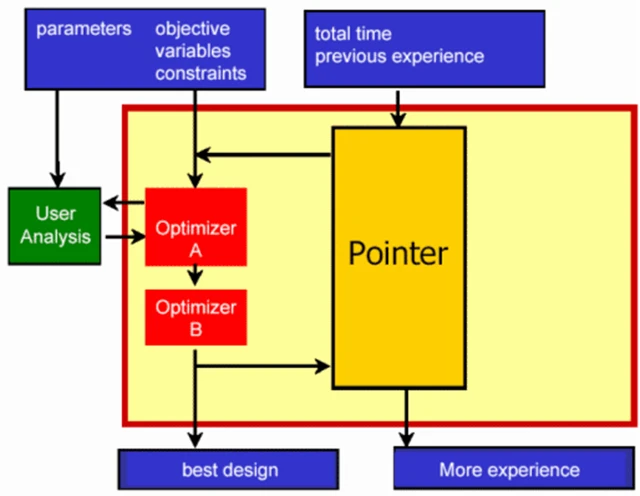
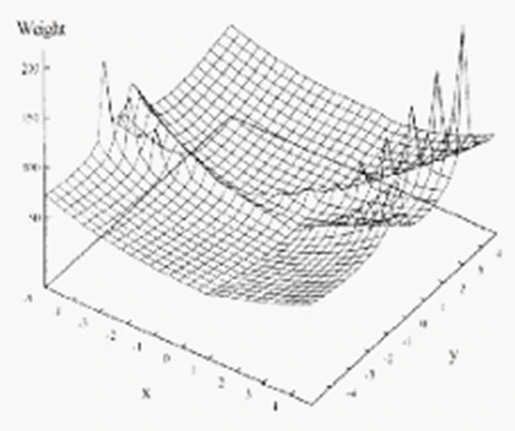
通常,不可能以这样一种方式识别问题拓扑,即您可以选择正确的算法和设置。下图显示了一个真实的例子。拓扑结构是通过计算流体动力学(CFD)计算的翼型阻力与其形状的函数。以前,用户(根据经验)认为拖动是几何体的平滑函数。从起点开始,选择了一小步来准确计算梯度。因为阻力的拓扑结构有表面波,所以最陡的下坡被认为是沿着这个波。如果你选择了一个更大的步长,你就会得出结论,垂直于波浪的方向具有“相关的”最陡的下坡。
波浪不是由问题的物理性质(阻力)引起的,而是由计算阻力的数字代码内收敛循环的数字干扰引起的。几乎所有使用偏微分方程的模拟代码都表现出这种行为。该图中的尖峰表示代码故障,这是另一个困难的拓扑特征,并非真实物理中固有的。
确定了十几种方法来纠正病理拓扑结构并找到正确的相关搜索方向。这些病理拓扑是由模拟代码中使用的数字算法类型创建的,而不是由模拟代码所解决的特定设计问题创建的。因此,指针技术提供的解决方案在广泛的拓扑结构中都是有效的。
Pointer Core Algorithms核心指针算法
核心指针算法是根据它们的单独性能和所使用的一组算法中的附加性能来选择的。
对于光滑问题,最好的优化器是序列二次规划(SQP)算法。SQP算法使用接近起点的函数调用来确定问题的拓扑结构。SQP广泛应用于轨道优化和结构优化。
指针技术中使用的SQP算法是由Klaus Schittkowski博士开发的NLPQL,它解决了具有等式和不等式约束的一般非线性数学规划问题。假设所有的问题函数都是连续可微的。从拉格朗日函数的二次近似和约束的线性化出发,用对偶码QL公式化并求解二次子问题。随后,对两个备选的优函数进行线性搜索,并用修正的Broyden-Fletcher-Goldfarb-Shanno(BFGS)公式更新Hessian近似。
对于非光滑连续问题,下坡单纯形法是不可比拟的。下坡单纯形法在化学工程领域尤其流行。与在起点附近开始计算的SQP不同,下坡单纯形从计算域的边缘开始计算。指针技术使用了Nelder和Mead实现的修改版本。单纯形是一个具有n+1个顶点的几何体,由二维的三角形和三维的四面体表示。该方法计算并比较可变空间中单纯形顶点处的目标函数,选择最差的一个,并将该点通过单纯形的相对面移动到较低的点。如果这个新顶点更好,则删除旧顶点。如果经过许多步骤后没有改进,该方法通过减少每一边的长度来“缩小”单纯形;从而捕获最优解。它不是直接沿最陡下降的方向移动最佳点(SQP的方法),而是沿最佳方向移动初始集的最差点。因此,SQP和下坡单纯形在假设和目标函数数据的计算使用方面几乎没有重叠。
指针技术中的另一种算法是所谓的进化或遗传算法。SQP和下坡单纯形通过分析确定最佳答案是基于先前的目标函数调用的。遗传算法工作得很好,因为它们在搜索中包含了随机性。它使算法能够纠正确定性搜索瓶颈。该方法不需要目标函数的连续性。
指针技术中的算法基于Schwefel教授的进化策略,后来由Mathias Hadenfeld博士进行了修改。进化策略从计算域内的大量点开始。在突变的情况下,每个点都会产生新的点,这些点正态分布在原始点周围。将选择该集合中的最佳点。在重组的情况下,随机数目的点交换参数值。搜索的波动性由平均变异的标准偏差决定,而不是步长(对于SQP)和单纯形的大小(下坡单纯形)。
遗传算法几乎总是有效的。然而,它们往往不是最好的算法,因为它们的计算费用很高。
Pointer's Performance on Benchmark Problems指针在基准问题上的应用:
指针技术已经在水翼船的船体形状设计等问题上进行了测试。
然而,任何优化问题通常都可以在正确答案已知且起点“调整”的情况下解决。这种比较将侧重于指针技术与已经很好的核心算法集的附加值。
虽然指针技术已经解决了许多问题,但本节使用了桁架优化问题,因为它代表了机械或航空航天工程中的典型设计问题。下图显示了一个桁架,因为它支持一系列点荷载。
?

?
桥在右边缘支撑,在左边缘自由。它有六个关节,它们的位置由优化器选择,以便在给定的一组负载下将重量或成本降至最低。重量是通过确定能够支撑所施加负载的最小钢筋尺寸来计算的。
这个问题很难解决,因为当接头位置相对于彼此移动时,钢筋上的载荷从压缩变为拉伸和反向。受压的钢筋(薄壁圆柱体)必须比受拉的钢筋(金属丝)厚得多。桁架结构的重量是接头位置的不连续函数。
优化任务是在30分钟内将桁架的重量降至最低。1993年,Mathias Hadenfeld完成了从随机起点优化桁架的任务。Hadenfeld是优化的专家用户。他可以自由地调整和重新启动解决方案,直到他觉得无法再取得进展,但他无法改变起点。他的结果如下图所示(蓝色符号)。平均而言,他在遗传算法上比下坡单纯形法更成功,而梯度法则失败了。由于问题的拓扑结构很困难,他的答案与已知的最优值平均相差15%。
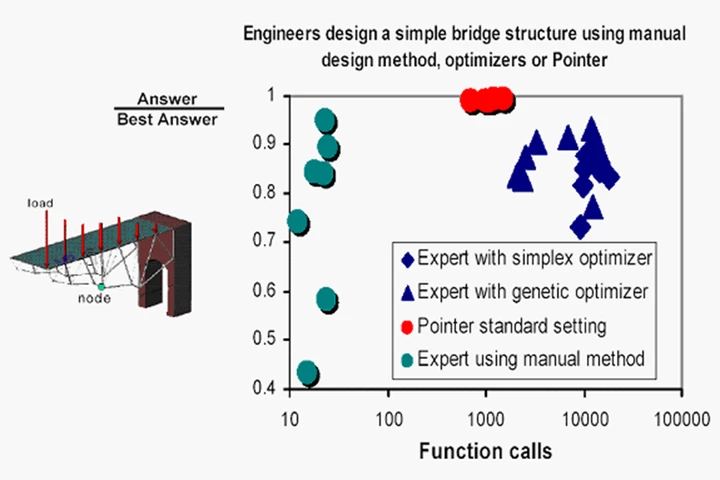
1999年,13组7至15名专业工程师也遇到了同样的问题。他们获得了指针技术及其显示桁架的图形用户界面。他们被要求在不使用优化的情况下最小化重量。他们必须手动输入关节坐标并运行分析,以查看是否进行了改进。因为分析可以在不到一秒钟的时间内完成,所以30分钟是完成任务的充足时间。迭代次数在10到30之间。根据我们的经验,这也代表了工业产品设计迭代的平均次数。
工程师们得出了截然不同的答案。有些的重量是最佳解决方案的两倍多。然而,有些人提出的解决方案与正确答案相差不到5%。有趣的是,他们只是通过使用桁架的图形表示来实现这些结果。在随后的一次没有图形的测试中,没有一位工程师能达到优化器最佳答案的20%。
接下来,指针技术被赋予了对核心优化器的控制权(图中的红色符号)。就像专家一样,指针技术使用遗传算法比使用下坡单纯形算法需要更少的函数调用来找到答案。但是,由于其标准设置允许所有算法的最佳使用,指针技术能够从任何起点只需1000次函数调用(<1分钟)就能始终如一地得到正确的答案。
尽管专家组在手动解决问题时得到了不同的答案,但在标准设置下使用指针技术时,所有人都得到了正确的答案。
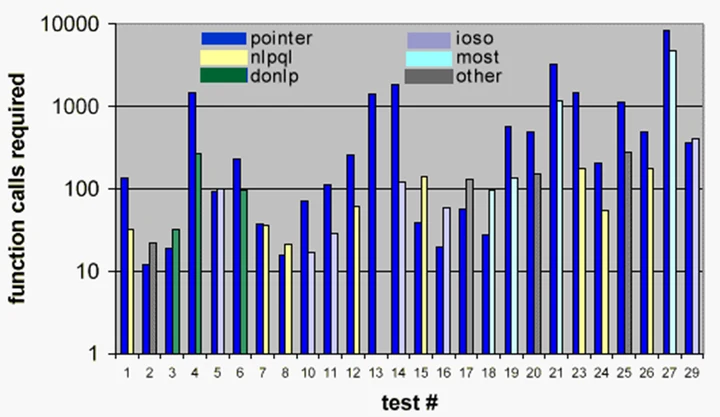
在标准基准测试中,将指针技术与十几个高质量优化器进行了比较。该测试由Sandgren博士设计,用于表示数学和工程各个领域的各种硬优化问题。尽管这些问题很难解决,但通常没有与客户合作时遇到的问题那么难解决。
下图显示了测试结果。然而,也许并不奇怪,指针技术在测试中表现得非常好。这是唯一能够解决所有问题的代码。考虑到所有测试用例都使用了相同的标准设置,而且在这个过程中没有专家干预,这一点更令人印象深刻。就速度而言,它通常可以与每个特定问题的最佳代码相媲美。“最佳”基准结果由《基于自组织的间接优化》(IOSO)一书的作者Egorov博士提供。比较中的其他代码包括IOSO、顺序二次规划(NLPQL)、DO非线性规划(DONLP)和多功能优化系统工具(MOST)。
? ?
通过牛顿方法进行求解。
Sequential Quadratic Programming (NLPQL) Technique
序列二次规划(NLPQL)技术假设目标函数和约束是连续可微的。
在NLPQL技术中,其思想是生成一系列二次规划子问题,通过拉格朗日函数的二次近似和约束的线性化获得。二阶信息由拟牛顿公式更新,并通过额外的线搜索来稳定该方法
1.1.1.17 应力比技术(Stress Ratio)
通过最小化元件的应力比来优化设计。
Stress Ratio Technique应力比技术是结构优化中常用的一种全应力设计方法。
以上优化算法各有特点,在应用时需要根据具体情况选择合适的算法以达到最优设计效果。

因为维度x可以指任何任意的维度或性质,所以指数因β解释了这一点。例如,如果框架结构的设计假设构件横截面与长度x为正方形,则轴向荷载的理想β值为0.5,弯曲荷载的理想值为0.33。在应力比算法中,所有设计变量都使用相同的β,但要理解指数越小,收敛越稳定(越慢)。
应力比技术假定设计变量和相关约束之间的反比关系,并根据关键相关约束的值修改设计变量。因此,命名约定用于关联约束和设计变量。例如,约束Stress1AtZone1、Stress2AtZone2和Stress3AtZonel与设计变量ThicknessAtZone1。
Ashley, H., “On Making Things the Best – Aeronautical uses of Optimization,” Wright brothers lectureship in aeronautics, Journal of Aircraft, vol. 19, no. 1, 1982.
Deb, K., Multi-Objective Optimization using Evolutionary Algorithms, Chichester, UK: Wiley, 2001.
Deb, K., S. Agrawal, A. Pratab, and T. Meyarivan, “A Fast Elitist Non-Dominated Sorting Genetic Algorithm for Multi-Objective Optimization: NSGA-II,” In KanGAL report 200001, Indian Institute of Technology, Kanpur, India, 2000.
Egorov, I. N., “Indirect Optimization Methods on the Basis of Self-Organization.” Optimization Techniques and Applications (ICOTA 1998), vol. 2, pp. 683–691, 1998.
Fonseca, C. M., and P. J. Fleming, “Genetic Algorithms for Multiobjective Optimization: Formulation, Discussion and Generalization,” In Proceedings of the 5th International Conference on Genetic Algorithms, pp. 416, vol. 423, 1993.
Goldberg, D. E., Genetic Algorithms in Search, Optimization and Machine Learning, Addison-Wesly, 1989.
Hadenfeld, M., Anwendung von Evolutionsstrategien fuer die Optimierungsaufgaben beim Vorentwurf von Flugzeugen, Braunschweig /Bremen, 1993.
Hans, S.P., (1974): Numerische Optimierung von Computer-Modellen (PhD thesis). Reprinted by Birkhauser (1977).
Han, S. P., “A Globally Convergent Method for Nonlinear Programming,” Journal of Optimization Theory and Applications, vol. 22, pp. 297–305, 1977.
Han, S. P., “Superlinearly Convergent Variable Metric Algorithms for General Nonlinear Programming Problems,” Mathematical Programming, vol. 11, pp. 263–282, 1976.
Hock W., and K. Schittkowski, “Test Examples for Nonlinear Programming Codes,” Lecture Notes in Economics and Mathematical Systems, vol. 187, Springer, 1981.
Ingber, L. “Adaptive Simulated Annealing (ASA),” [ftp.alumni.caltech.edu:/pub/ingber/ASA.tar.Z], Lester Ingber Research, Mclean, VA, 1993.
Kennedy, J., and R. C. Eberhart, “Particle Swarm Optimization,” Proceedings of the Institute of Electrical and Electronics Engineers International Conference on Neural Networks, vol. IV, pp. 1942–1948, IEEE Press, Piscataway, NJ, 1995.
Nelder, J. A., and R. Mead, “Downhill Simplex Method in Multidimensions,” Computer Journal, vol. 7, pp. 308–313, 1965.
Pincus, J., “Transistor Sizing,” UCB//CSD-86-285, 102 pages, February 1986.
Powell, M. J. D., “A Fast Algorithm for Nonlinearly Constrained Optimization Calculations,” in: Numerical Analysis, G.A. Watson ed., Lecture Notes in Mathematics, vol. 630, Springer, 1978a.
Powell, M. J. D., “The Convergence of Variable Metric Methods for Nonlinearly Constrained Optimization Calculations,” in: Nonlinear Programming 3, O.L. Mangasarian, R.R. Meyer, S.M. Robinson eds., Academic Press, 1978b.
Sandgren, E., “The Utility of Nonlinear Programming Algorithms,” Ph.D. thesis, Purdue University, December 1977.
Schaffer, J. D., “Multiple Objective Optimization with Vector Evaluated Genetic Algorithms,” In Proceedings of 1st International Conference on Genetic Algorithms and Their Applications, vol. 100, p. 93, 1985.
Schittkowski, K., “EASY-FIT: Parameter Estimation in Dynamic Systems,” User’s Guide, Mathematical Institute, University of Bayreuth, 1996.
Schittkowski K., “Easy-to-Use Optimization Programs with Automatic Differentiation,” Report, Mathematical Institute, University of Bayreuth, 1994.
Schittkowski K., “More Test Examples for Nonlinear Programming,” Lecture Notes in Economics and Mathematical Systems, vol. 182, Springer, 1987.
Schittkowski K., “NLPQL: A FORTRAN Subroutine Solving Constrained Nonlinear Programming Problems,” Annals of Operations Research, vol. 5, pp. 485–500, 1985/1986.
Schittkowski K., “Nonlinear Programming Codes,” Lecture Notes in Economics and Mathematical Systems, vol. 183, Springer, 1980.
Schittkowski K, “On the Convergence of a Sequential Quadratic Programming Method with an Augmented Lagrangian Line Search Function,” Optimization, vol. 14, pp. 197–216, 1983.
Schittkowski K, “Solving Nonlinear Least Squares Problems by a General Purpose SQP-Method, in: Trends in Mathematical Optimization,” K.-H. Hoffmann, J.-B. Hiriart-Urruty, C. Lemarechal, J. Zowe eds., International Series of Numerical Mathematics, vol. 84, Birkhaeuser, 1988.
Schittkowski K., “Solving Nonlinear Programming Problems with Very Many Constraints,” Report No. 294, DFG-Schwerpunktprogramm ‘Anwendungsbezogene Optimierung und Steuerung’, Mathematical Institute, University of Bayreuth, 1991.
Schwefel, H. P., “Evolutionsstrategie und Numerische Optimierung,” Ph.D. thesis, Verfahrenstechnik TUBerlin, 1975.
Shi, Y., and R. C. Eberhart, “A Modified Particle Swarm Optimizer,” Proceedings of the Institute of Electrical and Electronics Engineers International Conference on Evolutionary Computation, pp. 69–73, IEEE Press, Piscataway, NJ, 1998.
Srinivas, N., and K. Deb, “Multiobjective Optimization Using Nondominated Sorting in Genetic Algorithms,” Evolutionary Computation, vol. 2, no. 3, p. 221, Fall 1994.
Zitzler, E., and L. Thiele, “Multiobjective Evolutionary Algorithms: A Comparative Case Study and the Strength Pareto Approach,” IEEE Transactions on Evolutionary Computation, vol. 3, no. 4, pp. 257, 1999.
Zitzler, E., M. Laumanns, and L. Thiele, “SPEA2: Improving the Performance of the Strength Pareto Evolutionary Algorithm,” In Technical Report 103, Computer Engineering and Communication Networks Lab (TIK), Swiss Federal Institute of Technology (ETH) Zurich, 2001.

